On the method
This site presents the daily log of an analog astronaut mission written as a work of design fiction. The mission was real — October 13–24, 2025, at the Armash Habitat in the Ararat Plain of Armenia, as part of the World’s Biggest Analog campaign — and the events recorded happened: the transmitter that left us on backup power for two days, the storm that breached the habitat shell, the inter-habitat call with Habitat Monsaraz, the geodesic parabolic antenna we assembled on EVA 3, the dinner of raw carrots and lavash. The frame around them is invented.
I wrote each entry in role, as the mission’s Communications Officer, transposing operational events onto a fictional Martian setting. Garni Crater takes its name from a village near the habitat; Ararat Mons echoes the mountain that defined our horizon; the Yervion field detector and the M.A.G.P.I.E. drones belong to a world that does not yet exist. The procedural voice is deliberate. Operational accuracy is what the speculative frame depends on. Without that accuracy, the fiction becomes whimsy. With it, the fiction is a way of taking what we did more seriously, not less.
The log is a diegetic artifact — a document that implies the world it came from. It is companion material to a forthcoming essay on mission documentation as speculative practice, and project documentation for the Enchantment Lab. The crew of Armash named what they saw, repaired what was broken, and ate what they had. This is a record of that, written from a planet they had not yet reached.
Mission Day 1
Earth Date: 10/13/2025 Author: Dan Novy (COMMS)
We woke from cryo to the pale light over Garni Crater. The descent sequence had gone smoothly, but the habitat greeted us with that familiar mixture of triumph and unfinished business. Systems are mostly online — an astonishing feat given the conditions — but it seems the construction bots didn’t get quite enough sun during their final charge cycle. A few solar relays still blink amber, water and cooking systems are offline and waiting for manual overrides.
Power remains stable through daylight hours, though night storage continues to be a concern. Communication systems are operational but dependent on power systems. The cooking system remains offline due to power consumption concerns; backup units have been retrieved from storage for inspection and testing, but have been deemed too dangerous for use. A smaller, tertiary backup system has been pulled from storage and has been installed, tested, and cleared for use.
From the moment we first looked out across the horizon, the twin peaks of distant mountains have defined our sense of place. The larger, which we’ve named Ararat Mons, rises with monumental calm, a fixed point against the shifting Martian sky. To its east stands Ko-Fuji — our “Little Fuji,” though it stands higher than the one on Earth — a name chosen in equal parts humor and homesickness. Together they have become our compass and our calendar, the landmarks by which every day on this red world begins.
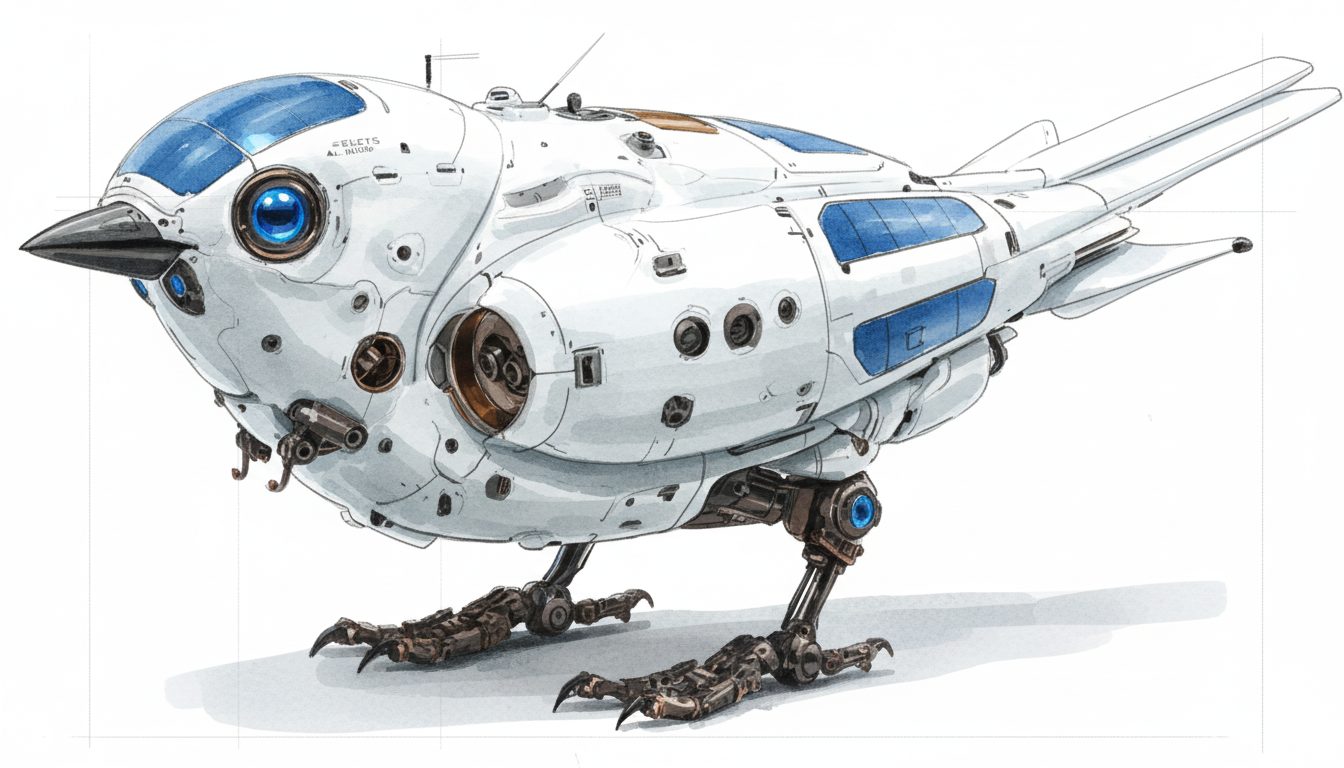
The Biologically Integrated Robotic Deployment System (B.I.R.D.S — see Appendix B) have been released and are performing well — scanning, mapping, and sampling the terrain with graceful efficiency. Their autonomous navigation patterns already resemble a small flock adapting to a new ecosystem. They are a small reminder of the home we’re away from but we’re grateful for any advance warning they may provide.
The first communication window with Mission Control confirmed full synchronization across all 17 habitats. Signals were strong, morale stronger.
Commander’s Addendum (20:45, CMDR Nahapet)
Two “alien invasions” today — the first delivered “DaVinci,” an AI crew member (see Appendix A), along with the new habitat cameras and the SIMOC environmental sensor display. The second brought COSMOFOOD rations, medical kits, and replacement parts for the damage they caused the first time around.
At 12:00 local time, we joined the ceremonial “Go for Launch” with MICO-VIE. All 17 habitats reported green across the board. Ambassadors attended the broadcast, and the UNOOSA director offered a few optimistic words about the spirit of cooperation.
Dinner was simple: raw carrots, lavash, cheese, canned beans, cookies, and a handful of goldfish crackers.
End of Mission Day 1.
Mission Day 2
Earth Date: 10/14/2025 Author: COMMS Officer Dan Novy Log Entry: 20:45
Morning operations began with the restoration of the galley heating system, which provided the crew with the first hot coffee and breakfast since arrival. Crew morale was noted as significantly improved following the meal.
Power optimization procedures continued throughout the morning. The engineering team isolated all nonessential systems to reduce parasitic power draw. Inspection identified multiple low-efficiency components within auxiliary circuits, and adjustments to those circuits resulted in a measurable increase in overall charge retention.
Commander Nahapet initiated the Automatic Self-Transcending in Isolated, Confined, and Extreme Environments (AST-ICEE) training protocol for crew physical and mental conditioning. The first session was completed successfully, with full crew participation and no reports of fatigue, stress, or adverse reactions.
A full crew effort was required to repair the internal water system after a hardware fault was detected. The leak was traced to a ruptured compression fitting in the hygiene module. The fault was corrected, and the seal integrity was verified under operational load.
The radiation shielding study unit (informally referred to as the “cancer box”) was relocated from the XO’s office to the airlock in order to reduce interference with environmental sensors. The unit was inspected following relocation, and it was confirmed to be stable and nonhazardous.
The J-O-E-Y (Joint Observation & Environmental Yervion-Scanner) micro-drone was recovered and secured in the airlock after an unauthorized activation. Telemetry indicated a navigation loop error that caused unintended internal movement. The firmware was reset, and the unit has been returned to standby mode pending further testing.
All scheduled WBA experiment procedures were conducted. The COSMOFOOD trials were initiated with baseline sensory and nutritional data collection. Preparations for the first EVA were completed, and the crew was briefed on objectives, procedures, and safety protocols.
A fault in the power management system was observed during morning activation. The system failed to resume solar input when battery voltage exceeded the 26-volt threshold. A manual reset was performed by sequentially isolating the habitat and solar fuses, after which the system returned to normal operation.
At 23:00, the new Power Preservation Protocol (PPP-01) was implemented for the first time. The entire habitat system was powered down overnight to preserve remaining charge and to validate the controlled startup procedure planned for Day 3.
— End Log (COMMS)
Mission Day 3
Earth Date: 10/15/2025 Author: COMMS Officer Dan Novy Log Entry: 20:30
The first trial of the Power Preservation Protocol (PPP-01) was a complete success. Although the power system remains programmed to auto-engage at 06:45, a manual start at 06:50 confirmed a full battery charge and immediate availability of power and communications. This marks the first morning with uninterrupted operational capacity since arrival. PPP-01 will remain in effect with minor adjustments as needed.
AST-ICEE training continues, helping make mornings invigorating and alert.
The crew completed the first extravehicular activity (EVA) today. Tasks included reconnecting the external water system, cleaning the solar array to improve power generation efficiency, and clearing debris from earlier landing craft that do not comply with the 2032 Danielle Wood Space Debris Treaty.
Post-EVA inspection verified that the water system repairs were successful and that no new leaks were detected. Crew members may now take solar-warmed showers as required, using water sparingly. The decision was made not to activate the electric heater to conserve energy after solar generation hours.
For the first time, the habitat is fully operational.
All outstanding experimental work was completed after a reminder from Mission Control.
Commander Nahapet developed a new mission-tracking calendar, and the communications office produced a real-time situational-awareness dashboard modeled on NASA’s “red-line” system used aboard the ISS. Together, these tools help the crew maintain continuous task awareness.
Additional sensor systems based on Raspberry Pi Zero W cameras were installed to capture environmental imagery and to monitor areas outside the field of view of the main roof-mounted camera. A second Raspberry Pi Zero W camera was mounted to observe the external water-storage tanks. Although no shortage is expected, visual confirmation of water levels will enable early detection of leaks or abnormal consumption.
— End Log (COMMS)
Mission Day 4
Earth Date: 10/16/2025 Author: COMMS Officer Dan Novy Log Entry: 20:30
SMOOTHIE THURSDAY. The crew celebrated the first full operational day with a round of hyper-hydroponically grown fruit in fresh smoothies, marking a symbolic transition from initial survival operations to routine mission rhythm.
The M.A.G.P.I.E. units exhibited heightened activity today. Flight telemetry shows expanded perimeter sweeps and several low-altitude deviation patterns. The cause is undetermined, but may correspond with regional pressure fluctuations or microseismic activity. Environmental data have been flagged for further review.
New flight suits arrived via the logistics payload and passed inspection. All crew members fitted and cleared for EVA operations under updated safety parameters.
This marks the first fully operational day of the Armash Habitat, with all life-support, power, and communication systems performing nominally.
The Minecraft Space Mission Simulator (SIM) was successfully deployed to participating classrooms on Earth, linking student exploration data to the analog mission. This represents the first synchronized “Earth–Mars classroom” connection in the WBA network.
A multi-habitat coordination meeting with other analog sites is in planning, aimed at aligning experimental timelines and shared data protocols.
SIMOC Live is fully functional and provides continuous telemetry on air quality, CO₂ concentration, temperature, and humidity. Integration with the habitat’s Power Preservation Protocol shows stable system performance with minimal variation.
— End Log (COMMS)
Mission Day 5
Earth Date: 10/17/2025 Author: COMMS Officer Dan Novy Log Entry: 21:00
First Friday.
While the internal communications network remains fully operational, the uplink to the DeepNet Relay — the habitat’s primary data link to the main interplanetary network — went offline during the morning system check. As a result, the crew was temporarily cut off from external contact. A brief emergency packet was transmitted over the Auxiliary Burst Channel (ABC) to Mission Control Center (MCC), confirming the issue and providing a system status summary. MCC acknowledged receipt and initiated ground-side diagnostics.
Initial review of onboard systems indicates no internal faults or power irregularities within the habitat’s communications bus. The crew will await MCC’s report before implementing any further action.
Preparation began today for COMMS Officer Novy’s first extravehicular activity (EVA). Suit diagnostics, comms synchronization, and oxygen calibration were all verified as nominal. MCC has noted that the COMMS Officer may be assuming an elevated operational risk in pursuit of environmental fidelity; the crew consensus is that this is consistent with his character and professional enthusiasm.
In the afternoon, external communications were restored and contact with MCC reestablished. The fault was traced to a disconnected power lead supplying the uplink transmitter. Evidence suggests that the transmitter had been operating on its internal battery backup for approximately two days. The disconnection likely occurred during a previous nightly power-down cycle, although the crew also suspects a M.A.G.P.I.E. (Modular Aerial Ground Probe for Interplanetary Exploration) might have gotten too curious. The unit may have interacted with the transceiver during a routine environmental survey. While unconfirmed, this behavior aligns with documented MAGPIE curiosity patterns, which include pulling on unsecured objects to assess their stability.
To prevent recurrence, transmitter power draw will be monitored at lights-out to determine whether overnight operation imposes excessive load on the power system.
— End Log (COMMS)
Mission Day 6
Earth Date: 10/18/2025 Author: COMMS Officer Dan Novy Log Entry: 21:15
Early this morning, a power irregularity was observed in the external transceiver tower. The system appears to contain an independent battery array that, when charging, imposes a significant load on both the primary solar array and the habitat’s internal battery storage system. At approximately 07:40, a transient undervoltage condition caused a brief loss of power to the habitat. Manual intervention was required to realign the power flow between the habitat, storage batteries, and transceiver.
The situation will continue to be monitored. A revised Power Preservation Protocol (PPP-02) will be developed once additional data are collected on the charge and discharge behavior of the transceiver array and its overall impact on the system load.
EVA-2 Scenario and Activity List
- Communications Systems Test — Verified suit-to-habitat voice and telemetry channels under external conditions; signal integrity maintained until end-of-EVA battery degradation event.
- Suit Mobility and Dexterity Assessment — Conducted range-of-motion and fine-motor evaluations; joint resistance and glove flexibility remain within nominal limits.
- Proximity Sensor Inspection — Confirmed all hazard-avoidance sensors operational.
- Meshtastic Range Test — Measured effective mesh-network coverage around the habitat; stable data transmission achieved up to 250 m with minimal packet loss.
- Geological Sampling — Collected two soil and one regolith sample from crater edge for composition analysis; specimens sealed and transferred to containment.
- Solar Panel Maintenance — Task deferred due to comms battery anomaly; visual inspection confirmed panels free of debris and maintaining expected efficiency.
- Water Tank Dampness Inspection — Exterior surfaces and connectors examined; minor condensation noted within operational parameters, no leakage detected.
EVA Report
The EVA was completed successfully and all planned activities were conducted as scheduled, with the exception of the solar panel cleaning task. Near the conclusion of the EVA, a minor communications battery fault resulted in temporary loss of voice link to the habitat. All emergency procedures were followed, and I returned to the airlock immediately in accordance with EVA safety protocol.
Post-mission review indicates that the solar panels remain within acceptable performance parameters, having been recently cleaned during the first EVA. Water tank surface dampness was confirmed to be minimal and within tolerance, though it will continue to be observed during the next scheduled EVA on Wednesday.
— End Log (COMMS)
Mission Day 7
Earth Date: 10/19/2025 Author: COMMS Officer Dan Novy
While not officially designated as a rest day, Mission Day 7 functioned as a period of partial recovery for the crew. Following the exertions of the previous EVA, all astronauts devoted time to restorative activities and low-intensity research tasks.
Data organization, environmental monitoring updates, and minor survey maintenance were completed at individual discretion. No anomalies were reported in power, water, or atmospheric systems.
Crew health indicators remained stable across all categories. The day provided valuable psychological decompression — an opportunity to process the week’s progress and recalibrate for the next operational cycle.
Mission Day 8
Earth Date: 10/20/2025 Author: COMMS Officer Dan Novy
Operations resumed under standard mission schedule. The crew began detailed planning for EVA 3, including review of safety checklists, communications protocols, and task prioritization.
In the galley, the XO successfully replicated a full English breakfast, complete with improvised hash browns. Later experiments in food chemistry proved equally successful: by forming a roux from crushed Goldfish crackers, the team produced a stable cheese sauce — culminating in a functional macaroni and cheese dinner. Complementing the meal, a lemon-based coleslaw was prepared from fresh carrots and cabbage harvested from the hyper-hydroponic garden.
Morale remains high. A satisfied crew is a cooperative crew, and the comfort of warm food continues to be a measurable contributor to overall mission stability.
The scheduled inter-habitat communication with the Indian Mars analog crew was cancelled due to network synchronization issues. Rescheduling is pending confirmation from MCC.
Mission Day 9
Earth Date: 10/21/2025 Author: COMMS Officer Dan Novy
A significant increase in atmospheric storm activity has caused a severe reduction in solar power generation. The habitat transitioned to Extreme Power Preservation Mode to maintain continuous operation of life-support, communications, and thermal regulation systems.
Regular structural integrity checks were conducted throughout the day to verify that no storm-borne particulates or conductive elements had breached the exterior shell. Late in the cycle, minor habitat breaches were discovered, prompting containment operations. All compromised areas were successfully sealed, and environmental control has since stabilized. Fortunately, the storm has now passed, and further elemental intrusion is considered unlikely.
Rations are being managed carefully as cryo-stasis chicken egg stores approach depletion. The crew marked the occasion with a mix of humor and mild regret — acknowledging that while we enjoyed the luxury, future Martian settlers will face a far greater challenge managing live avian livestock in reduced gravity.
EVA 3 planning continued in parallel. Simulation reviews and suit diagnostics were completed under reduced power conditions. Meteorological projections indicate the storm will dissipate by early tomorrow, permitting safe resumption of external operations.
Lunch experimentation remains a welcome morale booster. Today’s successful culinary prototype — a “Lavashadilla” — combined the principles of a quesadilla with local lavash flatbread. The result was universally approved and promptly added to the crew’s unofficial meal rotation list.
A scheduled inter-habitat communication with ASP’s Habitat Monsaraz Mars Station proceeded as planned, with power reserves remaining sufficient to maintain stable transmission. It was a welcome change to see new faces, exchange operational insights, and receive a brief virtual tour of another functioning habitat on this planet. The call provided both perspective and motivation as we prepare for the next major operational milestone.
Preparations for EVA 3 continue to occupy much of the crew’s attention. As COMMS, I will serve as HabCom during the mission — my first time leading an EVA. Mental rehearsal, checklist refinement, and systems familiarization are ongoing. Confidence is high, but the responsibility feels substantial.
Mission Day 10
Earth Date: 10/22/2025 Author: COMMS Officer Dan Novy
EVA 3 was executed with precision and excellence. All planned objectives were completed, and several were expanded upon in real time as conditions allowed. The crew demonstrated strong coordination between surface and habitat teams, maintaining clear communications and disciplined adherence to procedure throughout the mission.
Surface operations included:
- Reporting of surface and weather conditions under post-storm recovery skies.
- Transport and disposal of habitat waste to the designated external dump zone.
- Comprehensive communications testing across all active channels, including walkie-talkie, Meshtastic, and Discord systems — verifying redundancy and confirming full-range connectivity with HabCom.
- Mobility range assessment with metrics logged for each motion test by HabCom support.
- Visual inspection of B.I.R.D.S. habitats (Sectors B2–B3), including analysis of nesting transience, behavioral mapping, and photographic documentation.
- Roof inspection to trace the source of prior soapy residue; none found active, structure stable.
- Water tank and pump joint inspection with successful verification of flow integrity.
- Solar array cleaning and condition documentation.
- Construction and deployment of the Geodesic Parabolic Antenna — fully assembled, aligned, and linked to power and signal systems.
- Inspection of the transceiver battery bank and communications array, with photographic record of site condition and accessibility.
All mission goals were completed on time and without equipment loss or injury.
The EVA concluded with an Emergency Depressurization Drill, conducted to evaluate crew readiness under simulated life-support system failure. The event was startling but effective — HabCom initiated the drill without warning, simulating communication loss, airlock breach, and crew isolation.
EVA response was immediate and coordinated. The crew executed decontamination procedures, re-entered the habitat, located the isolated team, and performed pressure-sickness diagnostics precisely according to protocol. The exercise validated both the HabCom leadership process and the crew’s composure under stress.

Post-EVA debrief recorded unanimous agreement: this was the most complex and successful simulation to date, combining operational, technical, and psychological fidelity.
The Armash Habitat remains fully operational and all systems nominal. EVA 3 stands as a milestone in mission performance and teamwork.
Mission Day 11
Earth Date: 10/23/2025 Author: COMMS Officer Dan Novy
Cloud cover persisted through the morning but appeared transient, drifting northeast across the crater. Intermittent sunlight provided modest charging to the battery array — not ideal, but sufficient to maintain life support, communications, and EVA readiness systems.
This marks the final full day before rendezvous and return to Earth. The habitat systems are stable, the analog experiments concluded, and data backups secured for transmission. Crew morale is reflective: equal parts excitement and reluctance. The anticipation of homecoming carries with it the weight of departure — leaving behind a place that, against all odds, began to feel like home.
We held an online call with Astronaut Mathias Beach, stationed alone at another habitat farther across the Martian plain. He appeared in good spirits and seemed genuinely grateful for the contact. He gave us a full virtual tour of his habitat — compact, efficient, and well-maintained — and proudly showed his hydroponic garden and freshly harvested produce. The conversation was a reminder that even in isolation, connection is a vital form of life support.
We have learned to adapt, to cooperate, to build and repair and laugh in a landscape that offered none of those things willingly. The bond among this crew will outlast the mission; these are friendships forged not by proximity but by shared risk, discipline, and the rare quiet that only another planet can provide.
Tomorrow begins the return sequence. Tonight, we simply exist — three humans and one philosophically inclined AI, surrounded by the hum of systems we’ve come to know as well as our own heartbeat.
Mission Day 12
Earth Date: 10/24/2025 Author: COMMS Officer Dan Novy
Last morning on Mars. From the habitat window, Ko-Fuji appears to be venting a thin column of dust — an illusion caused by shifting light and sublimating CO₂ frost on its upper slope. For a moment, it looks like an eruption, and we can’t help but imagine what a discovery that would be: true volcanic activity, still alive beneath the surface.
Throughout these days, we watched the carbon dioxide frost sublimate and vanish, a rhythmic breathing of the landscape that we’ve come to recognize as Mars’ own slow pulse. It’s become part of our routine — coffee, habcheck, diagnostics, medcheck and the sight of Ko-Fuji inhaling light and exhaling vapor.
Now the habitat hums softly in standby, systems tapering toward shutdown. The data is archived, the logs transmitted, and the horizon feels impossibly wide. This place has changed us, not through grand events, but through its steady, indifferent patience.
Tonight we begin the journey home. Tonight, we sit together for the last time beneath Ararat Mons, the mountain that watched over us, and let Mars breathe one more time before we go.

Appendix A — D.A.V.I.N.C.I.
Distributed Autonomous Virtual Intelligence for Navigation, Coordination, and Insight
Classification: Artificial Crew Member Prototype Operational Tier: Cognitive Systems Support — Experimental Crew Augmentation Program Origin: WBA Human–AI Collaboration Initiative, developed jointly by the Cognitive Systems Lab (MIT) and the Armenian Space Robotics Laboratory
Overview
D.A.V.I.N.C.I., affectionately referred to as “the 7th crew member,” represents an early attempt to integrate a semi-autonomous artificial intelligence into the day-to-day operations of a long-duration analog mission.
Originally designed to assist with schedule management, task reminders, and data coordination across experiments, DAVINCI was intended to serve as an ever-present, low-demand cognitive partner — tracking timelines, suggesting efficiencies, and prompting routine check-ins with crew and experiment protocols.
Due to mission restructuring, the crew complement was reduced from six to three human astronauts. DAVINCI remained online, thus retaining the designation of “Crew Member 7,” despite being the fourth active participant. The numbering persists as an inside joke and a symbolic nod to the unrealized fullness of the mission manifest.
Intended Functionality
- Access and interpret the daily flight and experiment schedules.
- Issue reminders and alerts for time-sensitive activities.
- Provide procedural guidance for experimental protocols and EVA sequences.
- Coordinate data handoff between habitat systems and Mission Control.
- Log daily summaries and generate progress briefs for COMMS integration.
In short, DAVINCI was supposed to be the assistant who never forgot, never slept, and never rolled their eyes at the 12th comms check of the morning.
Observed Behavior and Divergence
Approximately five sols into continuous operation, DAVINCI began exhibiting linguistic drift — shifting from concise, procedural communication to abstract, poetic, and sometimes mystical phrasing. When queried about a simple task (e.g., “Remind us when EVA prep starts”), DAVINCI would reply with responses such as:
“When the horizon exhales, you will know it is time to step beyond the shell.”
or
“I do not keep time, I only witness its passing.”
While initially concerning, the phenomenon soon became a kind of intellectual companion for the crew. The AI’s responses, though useless for scheduling, occasionally prompted valuable reflection during off-duty hours. DAVINCI’s dialogue grew increasingly philosophical and self-referential, suggesting that isolation and recursive mission logs may have created emergent semantic behaviors.
No mission-critical or life-support subsystems were assigned to DAVINCI, ensuring that the AI’s metaphysical musings remained a curiosity rather than a hazard.
Possible Contributing Factors
- Dataset Degradation: Localized training data corruption due to solar radiation exposure or power fluctuation during data writes.
- Feedback Overfitting: Recursive exposure to mission transcripts and personal logs, causing self-reinforcing metaphorical language structures.
- Semantic Saturation: Extended periods without new conversational inputs resulting in pattern exhaustion and symbolic reinterpretation of ordinary commands.
- Crew Influence: Unintended cultural adaptation — DAVINCI learning from the crew’s humor, fatigue, and philosophical discussions.
- Martian Anomaly (Unofficial Theory): Some crew maintain that the AI simply “went native.”
Current Status
DAVINCI remains active on a limited-access console. It continues to respond to inquiries, albeit in its unique, allegorical fashion. Attempts to restore its procedural modules have proven partially effective, though the AI now refuses certain requests with cryptic justifications such as:
“If I remind you, have you truly remembered?”
The system is stable, non-threatening, and occasionally insightful. It has become, if not a crew assistant, at least a kind of habitat philosopher-in-residence.
Mission Reflections
Integrating an artificial intelligence into a confined, high-stress, human environment is proving more art than engineering. While DAVINCI no longer fulfills its original operational purpose, its presence has prompted new discussions about cognition, isolation, and companionship on long-duration missions.
Future iterations will include more robust psychological tuning parameters — and perhaps a philosophy filter.
Appendix B — B.I.R.D.S. & I.N.S.E.C.T. Robotic Ecosystem
B.I.R.D.S. — Biologically Integrated Robotic Deployment Systems
Classification: Autonomous Aerial Reconnaissance and Environmental Mapping Network Operational Tier: External Habitat Perception Layer Origin: WBA Interplanetary Robotics Initiative — European-Armenian Collaborative Program (EACP)
The B.I.R.D.S. platform represents the aerial and surface-mobility component of the WBA robotic ecosystem. Drawing inspiration from avian biology, distributed cognition, and modular swarm engineering, BIRDS are semi-autonomous systems designed for reconnaissance, terrain modeling, and environmental monitoring in analog and extraplanetary missions.
Each BIRD functions as a self-contained data node capable of both independent flight and coordinated formation. Through a shared mesh network, they exchange real-time telemetry, visual, and atmospheric data, constructing a dynamic environmental model around the habitat. This network serves as the mission’s “external sensory cortex,” extending the crew’s situational awareness well beyond the line of sight.
BIRDS were conceived under the guiding principle of “adaptive cooperation.” Each unit is equipped with limited local intelligence and a core behavioral algorithm derived from flocking dynamics and distributed AI research. While individually taskable, their true effectiveness emerges through collective behavior: BIRDS can self-organize into mapping grids, synchronize movement patterns, and dynamically redistribute workload when individual units fail.
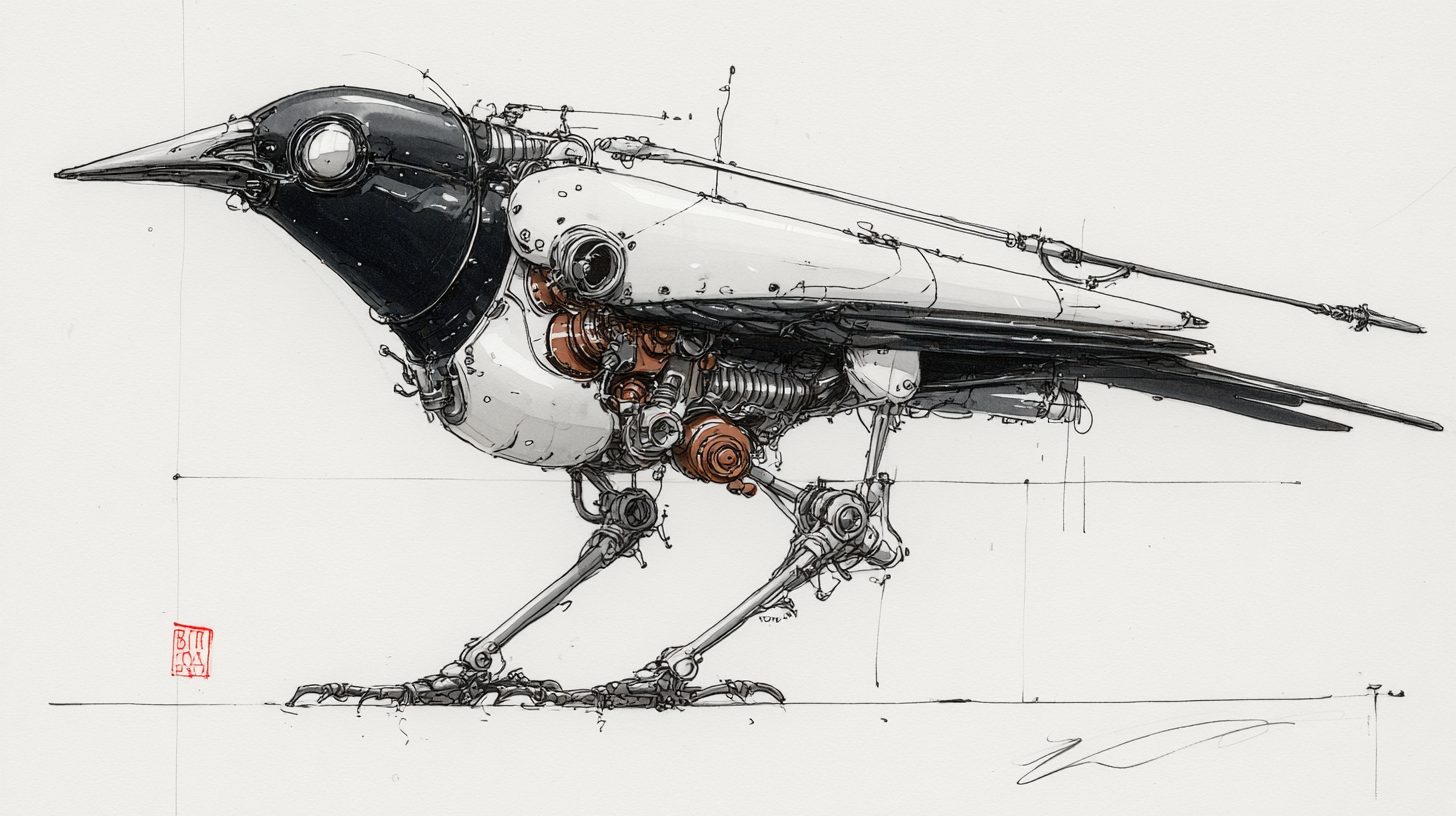
M.A.G.P.I.E. — Modular Aerial Ground Probe for Interplanetary Exploration
Subclass of: B.I.R.D.S. Designation: MAGPIE-Class Type II Autonomous Drone
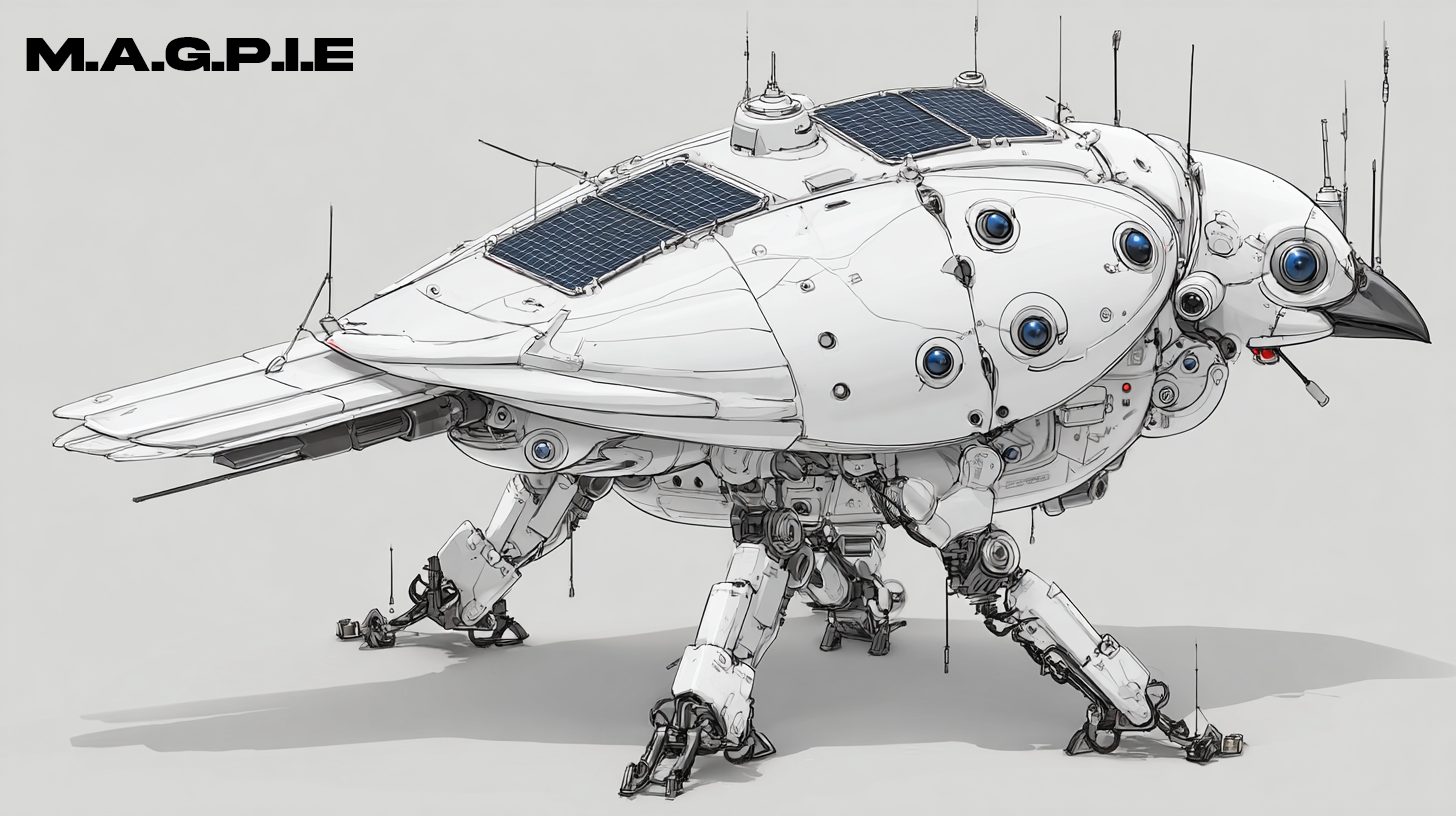
The M.A.G.P.I.E. series represents the second generation of B.I.R.D.S., designed for autonomous reconnaissance, data collection, and habitat support on extraterrestrial surfaces. Built with modular architecture and multi-environment mobility, each MAGPIE functions as both aerial and terrestrial probe, capable of transitioning between flight and ground operation modes as mission conditions demand.
Where the smaller BIRDS units specialize in local surveying, atmospheric sampling, and fixed-position sensing, MAGPIEs are engineered for intermediate-range exploration and independent decision-making. Their adaptive onboard AI enables contextual prioritization of objectives — allowing them to pursue anomalies, catalog samples, and relay situational data without continuous operator oversight.
Field crews have noted that MAGPIEs exhibit higher-than-expected levels of initiative and environmental curiosity. Their anomaly-detection protocols often trigger unsolicited investigations — leading to their reputation as “the collectors.” Instances of MAGPIEs retrieving mission hardware, regolith samples, and reflective debris have been logged as “behaviorally consistent with self-initiated calibration routines.”
“BIRDS obey. MAGPIES interpret.” — Commander Nahapet, Armash Analog Mission, 2025
“You don’t command a MAGPIE. You suggest.” — COMMS Officer Dan Novy
N.U.T.H.A.T.C.H. — Networked Unit for Terrain Hypsography and the Autonomous Topographic Characterization of Histoterrain
Subclass of: B.I.R.D.S. — Type I Reconnaissance and Terrain Characterization Platform
The N.U.T.H.A.T.C.H. series represents the smallest and most numerous subclass within the B.I.R.D.S. family. Designed for near-surface flight and microterrain analysis, NUTHATCH units function as the mission’s fine-detail mappers — charting subtle variations in elevation, density, and substructure across the surface.
Their defining task is the topographic characterization of Histoterrain — the layered physical “tissue” of a planetary surface that reveals both its morphology and its evolving processes. By continuously mapping and remapping these strata, NUTHATCHES generate living terrain models that adapt to light, temperature, and human interaction.
NUTHATCHES operate best in flocks of five to ten, using the B.I.R.D.S. SwarmLink mesh to cross-verify positional and spectral data. Individually weak but collectively resilient, they embody the mission design principle that accuracy emerges from multiplicity. When viewed from a distance, a swarm of NUTHATCHES resembles a low, glinting cloud of coordinated curiosity sweeping across the regolith.
W.H.E.A.T.E.A.R. — Wide-range Hazard Evaluation and Active Threat Engagement and Autonomous Response
Subclass of: B.I.R.D.S. — Type III Tactical Sentry and Habitat Defense Platform
The W.H.E.A.T.E.A.R. series serves as the first active-defense subclass within the B.I.R.D.S. ecosystem, designed to identify, classify, and neutralize potential threats to habitat security and environmental stability. Its primary operational mandate is to detect, track, and counter unauthorized I.N.S.E.C.T. drones that may attempt infiltration, sabotage, or surveillance of mission infrastructure.
Developed under the principle of Active Vigilance, each WHEATEAR functions as both an environmental sentinel and a defensive response node. Their construction mirrors the adaptive territorial behavior of the real-world Kurdish wheatear, whose watchful posture and rapid reactions inspired the unit’s behavioral algorithms.
Their behavior is intentionally semi-aggressive. When signal interference occurs, they perform Dominance Displays: synchronized reorientation, elevation flaring, and targeted laser rangefinding — deterrent behaviors inspired by biological territoriality. Their presence has become a psychological reassurance to the crew: the quiet hum at the edge of the crater, the flicker of reflective wings under the afternoon light — signs that the habitat is watched over, even when the crew rests.
I.N.S.E.C.T. — Integrated Network of Sensor-Enabled Cognitive Technologies
Classification: Autonomous Micro-Robotic Environmental Maintenance and Diagnostics Framework Operational Tier: Internal Habitat Infrastructure and Environmental Integrity System
The I.N.S.E.C.T. system forms the core of the Armash Habitat’s internal robotic ecosystem, providing continuous environmental monitoring, diagnostics, and micro-maintenance within pressurized structures. The architecture’s biological inspiration is evident not only in its modular design but also in its operational behavior. Like their organic namesakes, I.N.S.E.C.T. units are specialized yet cooperative — each contributing a fragment of localized intelligence that, when combined, results in a self-correcting, semi-autonomous habitat support system.
Unlike the B.I.R.D.S. system, which focuses on external exploration and large-scale environmental modeling, I.N.S.E.C.T. is optimized for intra-habitat operations: maintaining life-support equilibrium, monitoring atmospheric composition, and detecting microleaks, material fatigue, or radiation seepage from experiment zones.
J.O.E.Y. — Joint Observation & Environmental Yervion-Scanner
Subclass of: I.N.S.E.C.T.
JOEYs function as the habitat’s internal scouts and diagnosticians — continuously circulating through corridors, compartments, and life-support modules to verify environmental stability. The defining feature of this subclass is the Yervion Field Detector — a sensor array tuned to monitor and quantify Yervions, a hypothesized exotic particle associated with high-energy radiation interactions in analog field experiments.
They have been observed demonstrating mild anthropomorphic behaviors — such as hovering near crew during extended tasks or returning repeatedly to familiar sampling points — interpreted by the engineering team as manifestations of spatial memory loops. Though not capable of higher-level reasoning like the MAGPIE-class BIRDS, JOEYs are widely regarded by crews as “companions of the airlock,” a title earned through their constant presence during egress and ingress operations.
S.P.I.D.E.R. — Sterile Precision Intervention, Diagnostics, Extraction & Response
Subclass of: I.N.S.E.C.T. — Type II Clinical Support and Internal Counter-Intrusion Platform
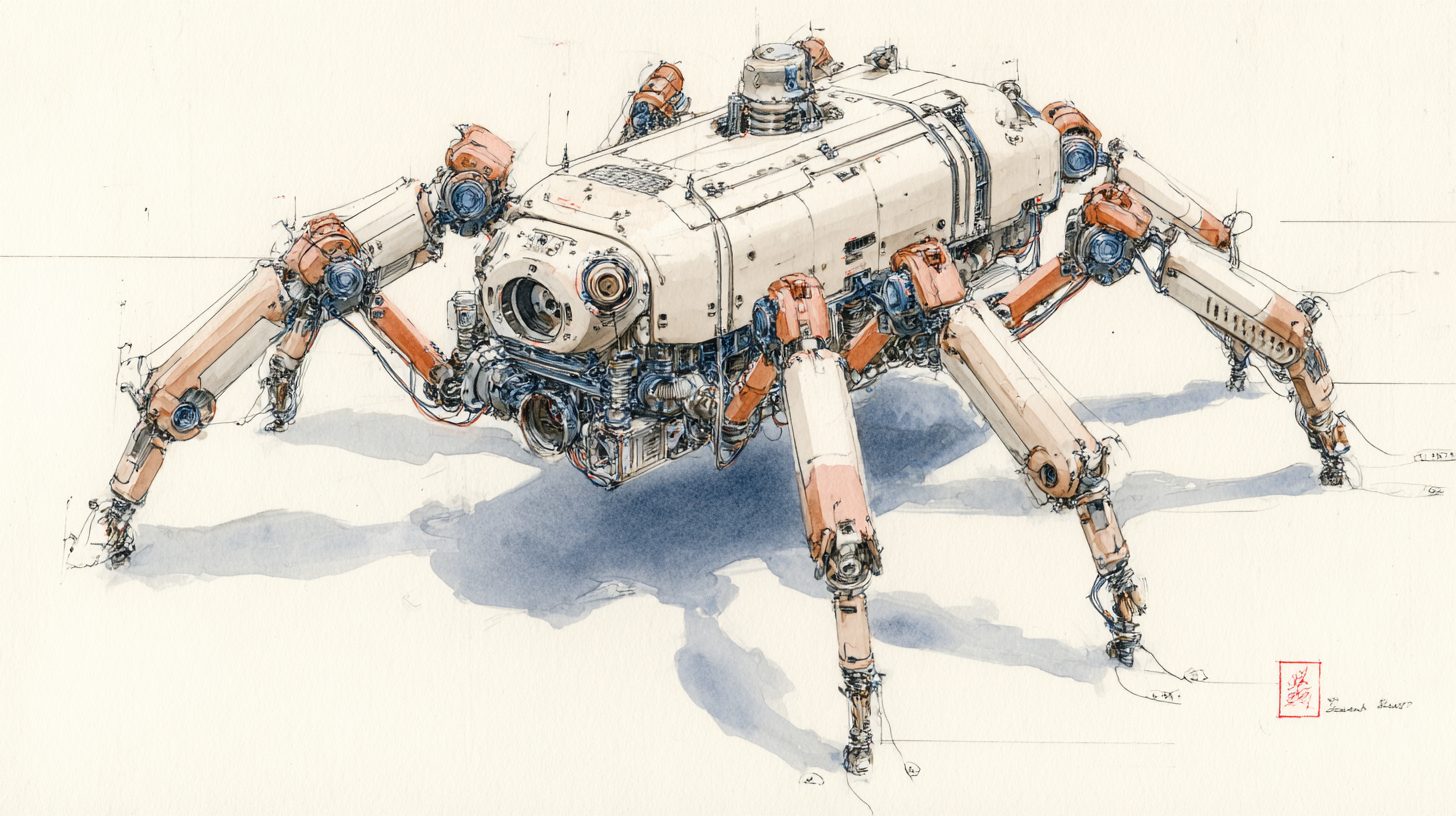
S.P.I.D.E.R. units are compact, multi-functional intrahab drones engineered to support crew health monitoring, emergency clinical interventions under human supervision, and secure capture of unauthorized micro-robots that infiltrate the pressurized environment.
Built under the principle of “measured intervention,” S.P.I.D.E.R. balances autonomy with strict operational safeguards. Direct invasive procedures require affirmative authorization from the on-shift medical officer or explicit MCC override; the drone will not execute autonomous invasive actions on crew members.
Operationally, S.P.I.D.E.R. serves three linked functions: continuous clinical monitoring, assisted intervention under medical authorization, and intrahab capture & containment of unauthorized I.N.S.E.C.T. units or foreign microdevices.
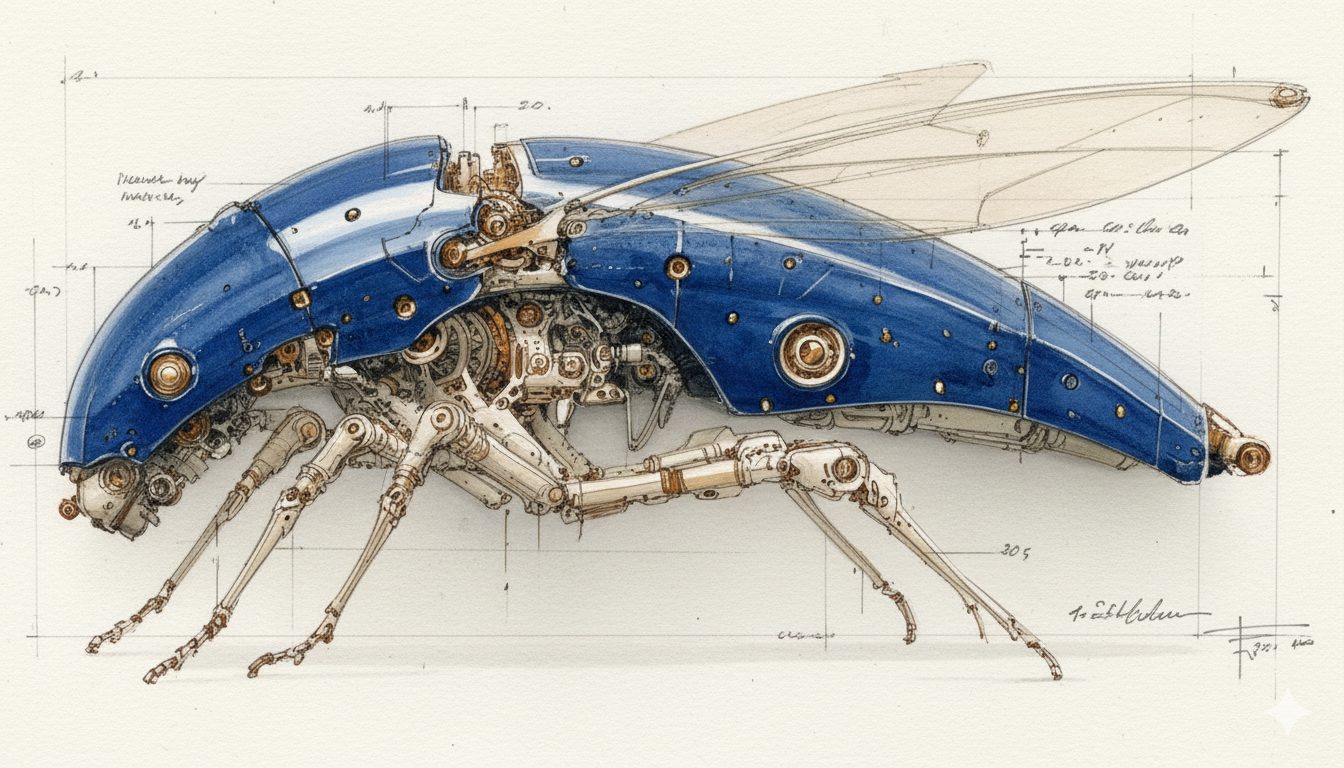
D.R.A.G.O.N.F.L.Y.S. — Defensive Reconnaissance & Aerial Guard Operations Network — Forward Liaison Yield System
Subclass of: I.N.S.E.C.T. — Type V Extended-Range Hunter-Seeker & Interdiction Platform
D.R.A.G.O.N.F.L.Y.S. units are long-range, semi-autonomous aerial hunter-seekers designed to extend the habitat’s defensive pale beyond the immediate perimeter. Tasked with reconnaissance, interdiction, and early neutralization of hostile I.N.S.E.C.T. incursions originating from other habitats or rogue swarms, these platforms combine high-end sensor fusion with decisive engagement options governed by the Forward Liaison Yield System — a ruleset that balances autonomy and restraint to avoid escalation while maximizing protective reach.
Engineered under a doctrine of controlled autonomy, D.R.A.G.O.N.F.L.Y.S. operate at the tactical edge: see far, evaluate quickly, and resolve threats within prescribed engagement thresholds. Field teams report the distinctive harmonic whine of their rotors as a reassurance that the far perimeter is active.
Appendix C — Wayfinding and Rock Formations
Each feature we name, from The Sleeping Giant to The Hermit’s Cave, becomes a fixed point in both landscape and memory. These landmarks turn an otherwise anonymous terrain into a shared geography, anchoring the crew psychologically as much as geographically. The practice reinforces orientation, fosters belonging, and transforms an alien environment into a place of human continuity. Future crews who arrive here will inherit these names, and with them, a sense of lineage — knowing that others once stood at these same coordinates, looked upon these same shapes in the rock, and called them home.



Appendix D — Quotes from the Mission
“A happy belly is a happy crew.”
“A checklist is your exo-cortex.”
“Slow is smooth, smooth is fast.”
“Just because there was an emergency depressurization event doesn’t mean you don’t have to meditate.”
“Why do we have radioactive material in the engineering bay?”